富山サイバーナイフセンターTEL 076-443-6208
五福脳神経外科TEL 076-443-6200
HOME > サイバーナイフ > サイバーナイフとは > 追尾照射システムの特徴
追尾照射システムの特徴
- 頭蓋骨追尾システム
(転移性脳腫瘍・髄膜腫・聴神経腫瘍など) - 椎体追尾システム
(頚部腫瘍・転移性骨腫瘍など) - マーカー追尾システム
(前立腺癌など) - 呼吸追尾システム
(肺癌・肝臓癌・膵臓癌など) - 腫瘍追尾システム
(肺癌)
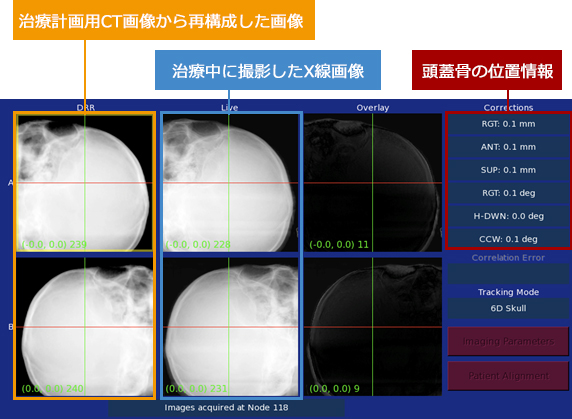
頭蓋骨追尾システム (6D Skull Tracking)
治療中随時行われるX線透視撮影によって頭蓋骨の六次元位置情報をほぼリアルタイムに解析し、ロボットアームが患者様のわずかな動きに対して照射位置補正を行うため、頭蓋内病変に対して常に高精度な追尾照射を行うことができます。
この技術により、従来の定位放射線治療で行われた痛みを伴う頭蓋骨への金属フレーム装着は必要なく、プラスチック製マスクによる固定のみで治療を行います。
<治療中の位置情報解析画面>
頭部病変治療時の固定方法
-
【従来の固定方法】
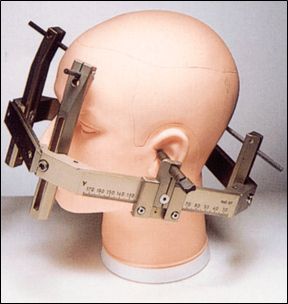
侵襲的な頭蓋骨への金属ボルト固定

-
【サイバーナイフ治療での固定方法】

プラスチック性のマスク固定のみ
低侵襲性と高精度の両立
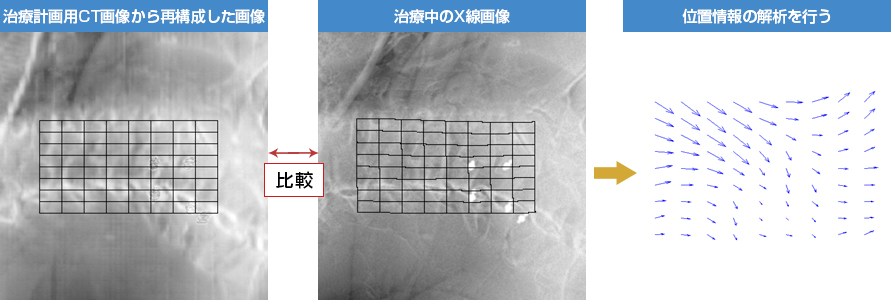
椎体追尾システム (X Sight Spine Tracking)
X線カメラで撮像した脊椎の画像に、メッシュ状の解析エリア(9×9の解析ポイント)を設定する事で、前屈や後屈、ねじれなどの変形も詳細に解析することができ、従来には無かった脊椎周囲病変に対する厳密な追尾照射を可能とします。
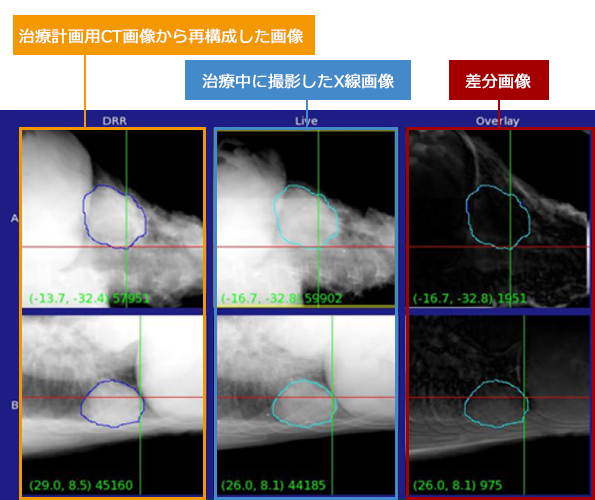
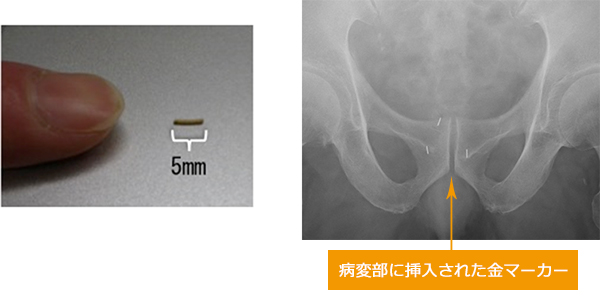
マーカー追尾システム (Fiducial Tracking)
頭蓋骨や脊椎から離れたところにある病変を治療する場合、あらかじめ病変部近傍に金属マーカーを挿入し、そのマーカーを指標として病変部の位置情報を解析し、追尾照射を行います。
<治療中の位置情報解析画面>
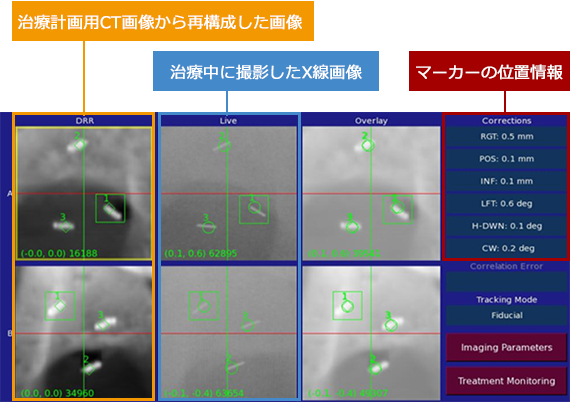
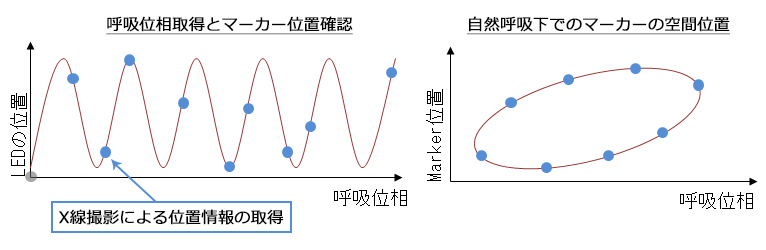
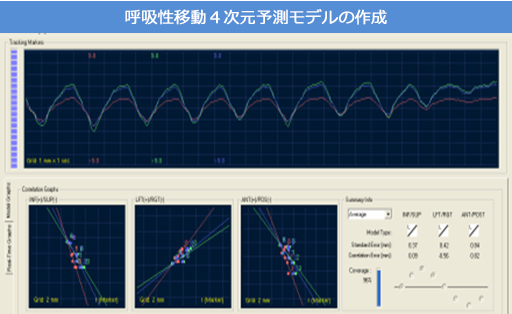
呼吸追尾システム (Synchrony)
呼吸性移動を伴う病変(肺がんや肝臓がん等)に対するサイバーナイフ治療は、あらかじめ病変部近傍に金属マーカーを挿入し、自由呼吸下における病変の動きを金属マーカーで捕らえ動体追尾することにより行います。動体追尾システムは、胸壁に取り付けたLEDマーカーの動きを常時監視することで呼吸波形を取得すると共に、随時X線透視撮影を行い呼吸位相に応じた金属マーカーの位置情報を取得します。それらの情報から呼吸位相と病変位置との関係を解析し、自由呼吸下における病変位置の4次元予測モデルを作成します。照射時は予測モデルに従ってロボットアームが連続的に動くことにより照射ビームが病変を動体追尾します。治療中も呼吸波形を常時監視すると共に定期的な X線撮影によってモデルを更新させるため、患者様の呼吸状態の変化にも対応することが可能です。
従来の放射線治療に比べ、周辺正常組織への放射線量を大幅に低減


動態追尾照射
動態追尾照射について動画でご紹介。
詳しくは下記の動画をご覧ください。
腫瘍追尾システム (X sight Lung Tracking)
X線画像において目視が可能な肺腫瘍の場合は、腫瘍自体の位置を高精度に解析し、呼吸追尾システムを用いて照射を行う事が可能です。
体内マーカー挿入を行う必要がないため、より侵襲性の低い治療が可能です。
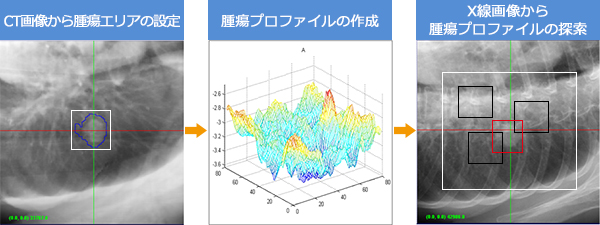
<治療中の位置情報解析画面>